
Imagine um mundo onde robôs interagem conosco de forma natural, realizando tarefas complexas e aprendendo continuamente. Essa realidade está mais próxima do que nunca, graças a ferramentas poderosas como o Robot Operating System (ROS) Tutorial. Neste tutorial completo, vamos desvendar os mistérios do ROS e te guiar pelos primeiros passos na criação de seus próprios projetos robóticos.
O que é o ROS?
O ROS é um framework de software open-source projetado para facilitar o desenvolvimento de software para robôs. Em vez de reinventar a roda a cada novo projeto, o ROS oferece uma plataforma modular e flexível, com uma vasta gama de ferramentas e bibliotecas prontas para uso. Isso permite que os desenvolvedores se concentrem na lógica específica de suas aplicações, sem se preocupar com os detalhes de baixo nível.
Por que usar o ROS?
- Comunidade ativa: possui uma comunidade global de desenvolvedores que colaboram ativamente na criação de novos pacotes e ferramentas.
- Flexibilidade: pode ser utilizado em uma ampla variedade de robôs, desde pequenos drones até grandes braços robóticos industriais.
- Modularidade: é organizado em módulos chamados “pacotes”, o que facilita a reutilização de código e a criação de projetos personalizados.
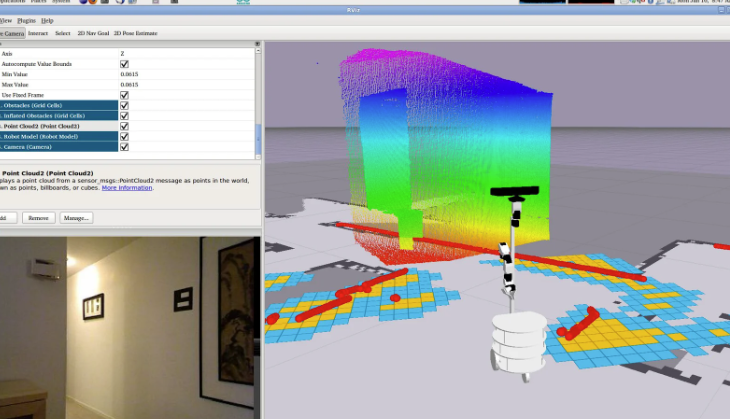
- Ferramentas poderosas: oferece uma variedade de ferramentas para simulação, visualização e depuração de robôs.
Primeiros passos com o ROS
- Instalação: A instalação do ROS varia dependendo do seu sistema operacional. Consulte a documentação oficial do ROS para obter instruções detalhadas.
- Criando um workspace: Um workspace é um diretório onde você armazenará seus pacotes ROS.
- Criando um pacote: Um pacote ROS contém o código-fonte, os arquivos de configuração e os dados de um componente específico do seu robô.
- Escrevendo o código: O ROS utiliza o C++ e Python como linguagens principais. Você pode começar escrevendo nós simples para publicar e subscrever tópicos (mensagens).
- Executando o código: Utilize as ferramentas do ROS para executar seus nós e visualizar os resultados.
Tópicos avançados
- Simulação: Utilize simuladores como o Gazebo para testar seus algoritmos em um ambiente virtual.
- Navegação: Implemente algoritmos de navegação para permitir que seu robô se mova no ambiente de forma autônoma.
- Percepção: Utilize sensores como câmeras e LIDAR para permitir que seu robô perceba o mundo ao seu redor.
- Manipulação: Controle braços robóticos para realizar tarefas como pegar e colocar objetos.
Conclusão
O ROS é uma ferramenta poderosa e versátil para o desenvolvimento de robôs. Com este tutorial, você deu seus primeiros passos no mundo do ROS e está pronto para explorar as infinitas possibilidades que essa plataforma oferece. Lembre-se: a melhor forma de aprender é praticando. Comece com projetos simples e gradualmente aumente a complexidade.
Este artigo é apenas uma introdução ao ROS. Para aprofundar seus conhecimentos, explore a vasta documentação e comunidade do ROS.

